Wen Yu's Laboratory
|
Home | Publications | Activities | Teaching | Students | Lab | |
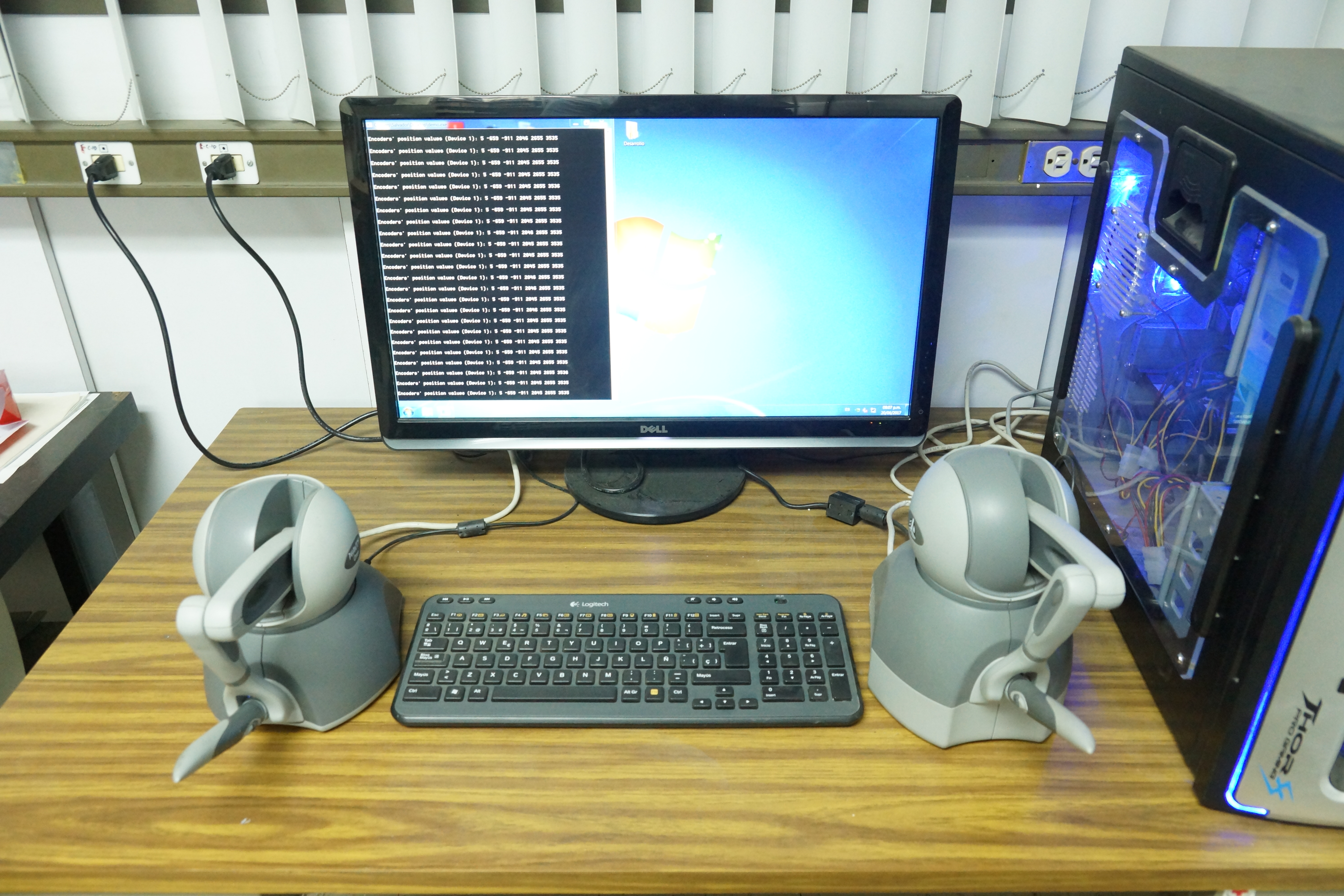
3D crane system. This is a real-time, multi-input multi-output (MIMO) nonlinear control system. It employs three DC motors for control and five position-measuring wheel encoders (three for position and two for angle). The encoders provide high-resolution measurement, with 4096 pulses per rotation (ppr). A hardware power interface amplifies the control signals from the PC to the DC motors and converts the encoder pulse signals into 16-bit digital format for computer reading. Communication between the control computer and the hardware interface is facilitated by an RT-DAC4 PCI board (handling incremental encoder inputs and PWM outputs). The computer is an AMD 450MHz model. The operating environment consists of Windows 98, MATLAB 5.3, Simulink 4.0, Real-Time Workshop 5.0, Real-time Windows Target 2.0, and Watcom 11.0.
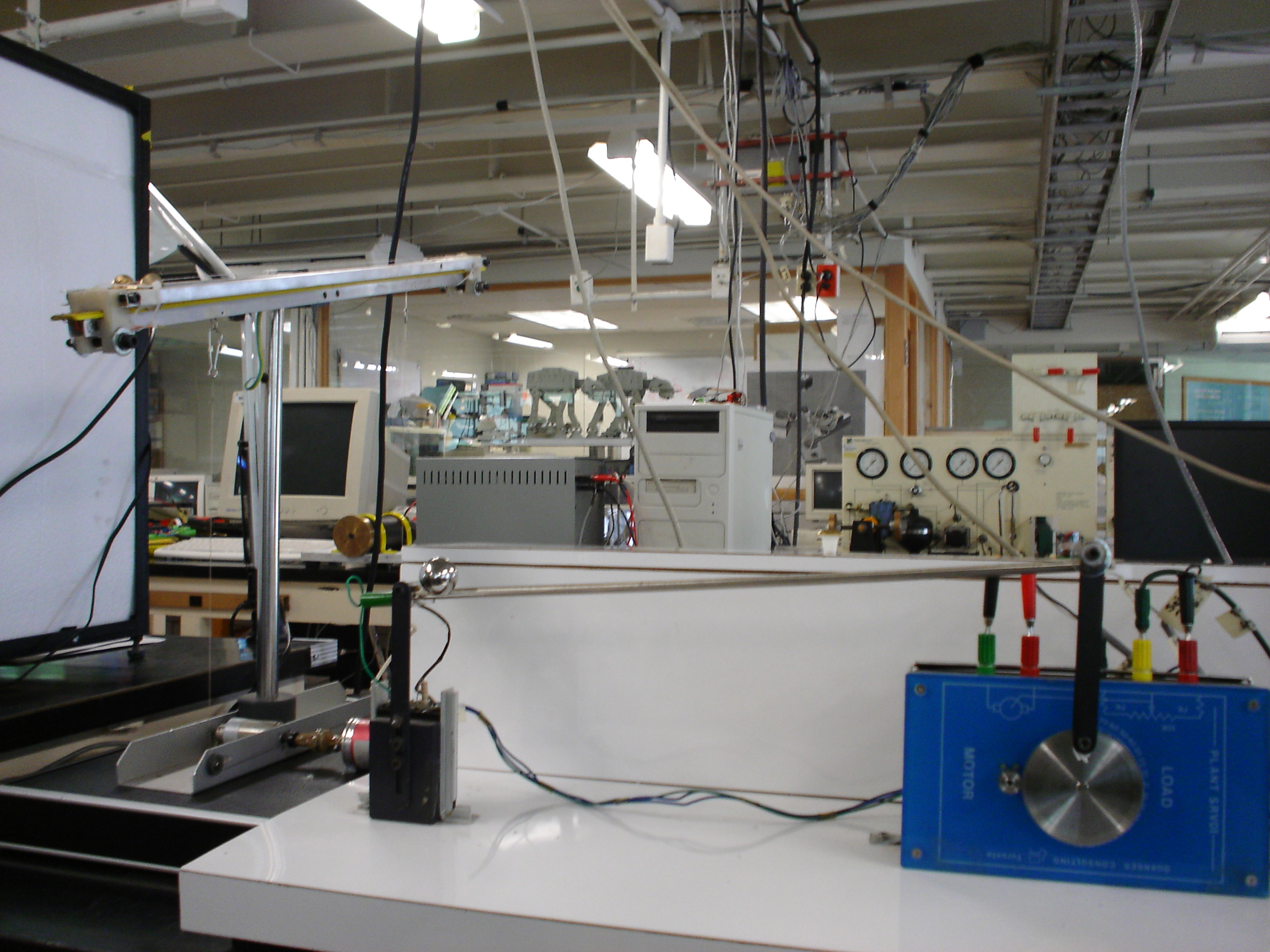
Ball and beam system. This is a real-time, single-input single-output (SISO) nonlinear control system. In this experiment, a ball is allowed to roll freely along the track of a beam. Transducers mounted on the ball and beam continuously monitor the ball’s position and the beam’s angle. The control objective is to move the ball from one position on the track to another by adjusting the track’s angle. The system has one output (ball position) and two inputs (beam angle and ball velocity). Analog-to-digital (A/D) and digital-to-analog (D/A) conversions are handled by an RT-DAC4 PCI board. The operating environment includes Windows XP, MATLAB 6.5, Simulink 5.0, Real-Time Workshop 5.0, Real-time Windows Target 2.2, and Visual C++ 6.0.

Synchronization of two ball and beam systems. The ball and beam system is a widely used and essential laboratory model for teaching control system principles. However, two primary challenges exist in synchronizing the ball and beam: 1) Simple Controllers and Linear Models: Many laboratories employ basic controllers like proportional-derivative (PD) control, relying on linear models for theoretical analysis. 2) Nonlinear Controllers: Theory vs. Practice: While nonlinear controllers for the ball and beam system have promising theoretical outcomes, their practical implementation is limited. In our approach, we initially utilize PD control with exact nonlinear compensation to address cross-coupling synchronization. Subsequently, a neural network is employed to approximate the nonlinear compensator. The synchronization control can be implemented in either parallel or series configurations.
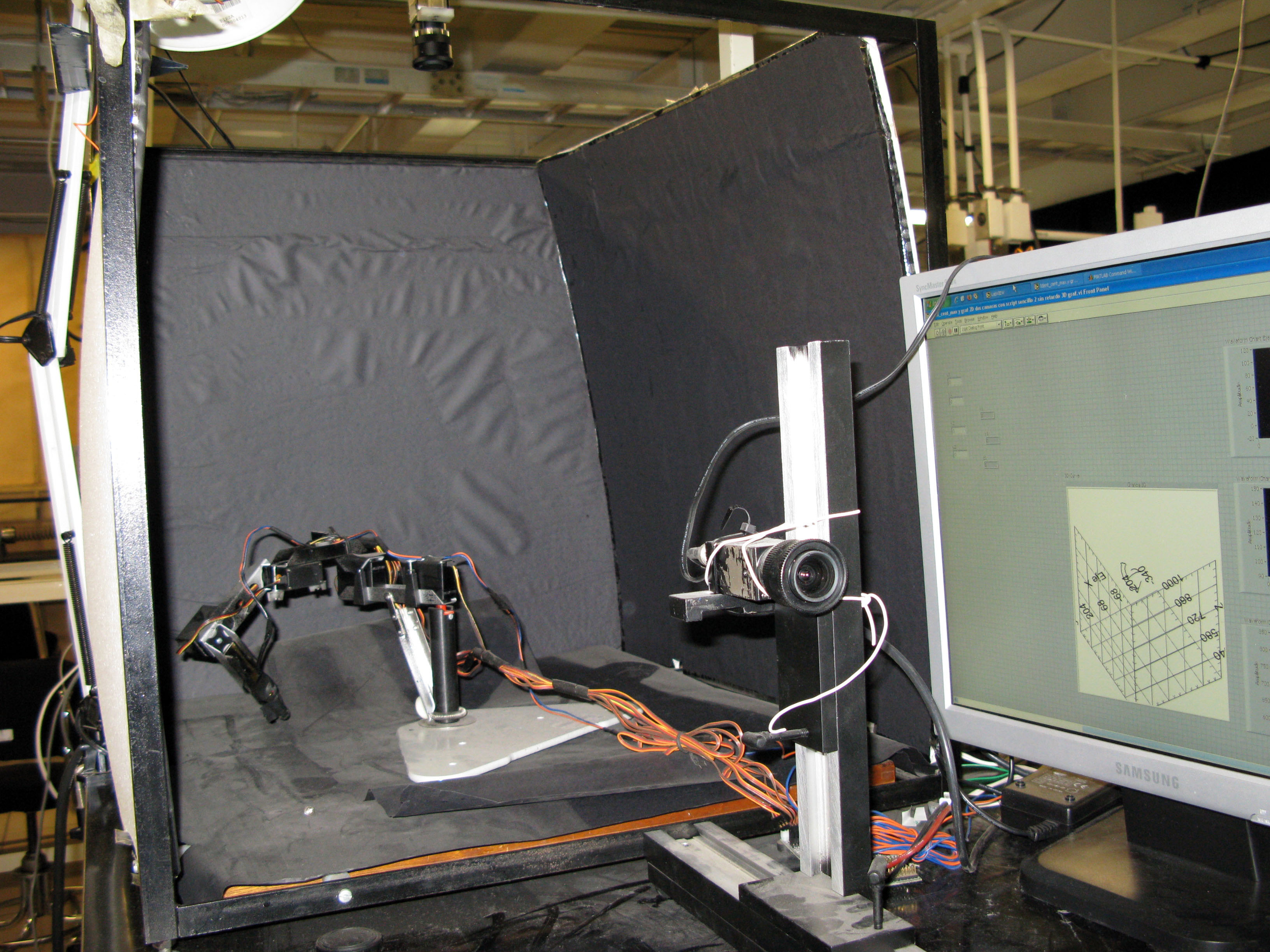
3-D vision system. Generally, recognizing a 3D object necessitates two or more suitably defined 2D images. In real-time applications, these methods often encounter one or more limitations. Establishing correspondence between images can be challenging. A balance between efficiency and accuracy is frequently required, ensuring sufficient accuracy while minimizing computational overhead. We demonstrate that with known initial scene conditions, it is feasible to determine stereo correspondence from two images using a novel geometric model. These algorithms process images rapidly and efficiently.
Magnetic Levitation System. Magnetic levitation has been successfully applied in various domains. Recently, significant research has focused on suppressing disturbances within magnetic levitation systems. However, existing control methods often fall short due to their reliance on unknown disturbance models. The primary objectives of this project are: 1) Modeling Magnetic Levitation Systems: Developing accurate models of magnetic levitation systems. 2) Neural Control for Magnetic Levitation: Implementing neural control techniques to address the challenges posed by unknown disturbances.

Active Structural Control with Stable Fuzzy PID Techniques. Active vibration control can significantly reduce building vibrations by 60-80%, surpassing the effectiveness of widely adopted passive anti-seismic systems. Recent reports highlight successful practical applications of active vibration control in buildings. Additionally, numerous advanced control and measurement techniques can enhance the performance of active structural control. This work delves into the application of intelligent techniques for measuring building displacements and controlling active devices. We initially propose offset cancellation and high-pass filtering to address common challenges associated with measuring building displacements using accelerometers. Subsequently, we analyze the most prevalent control algorithms in industry, namely PD and PID controllers. We then combine industrial PID control with fuzzy compensation, ensuring stability through standard weight training algorithms. This approach provides explicit selection methods for PD/PID control gains. Finally, fuzzy logic and sliding mode control are applied to structural vibration control. Experimental studies on a two-story building prototype incorporating these controllers are also discussed.
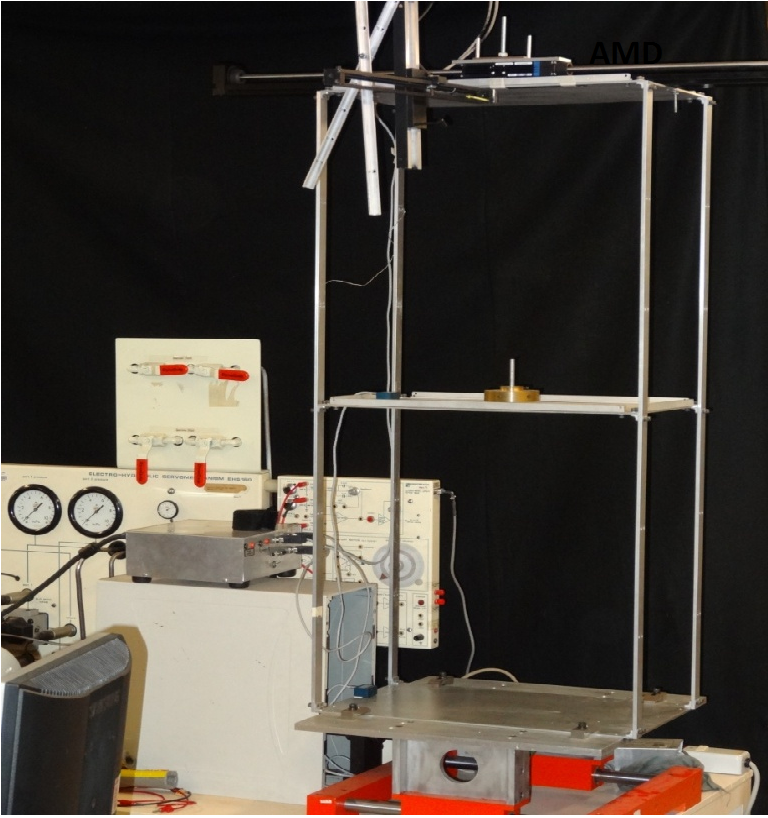
Bidirectional Modeling and Structural Control for earthquake. This research focuses on building structure modeling and control under bidirectional seismic waves. It explores various types of bidirectional control devices, control strategies, and bidirectional sensors employed in structural control systems. Key areas of investigation include system identification techniques, time-delays within the system, estimating velocity and position from acceleration signals, and optimally placing sensors and control devices. The significance of control devices and their applications in minimizing bidirectional vibrations is also emphasized.
.
Modular Design and Control of an Upper Limb Exoskeleton. We employ a modular design approach to construct an upper limb exoskeleton. This innovative design method offers greater simplicity and ease compared to other techniques, facilitating its extension to robots with more joints. Additionally, we introduce a novel admittance control method operating in task space. This admittance control adopts a PID form and eliminates the need for inverse kinematics and the dynamic model of the exoskeleton. Experimental results demonstrate the effectiveness of both the design and controller for the upper limb exoskeleton.

Impedance and Admittance Control. Human-robotic systems involve interactions between human operators and robots. These systems should be designed with meticulous attention to the dynamic characteristics and control capabilities of human operators. This proposal conducts manual tracking control experiments on a human-robotic system utilizing an impedance and admittance controlled robot. The research investigates the control characteristics of a human operator in relation to the robot’s impedance properties.

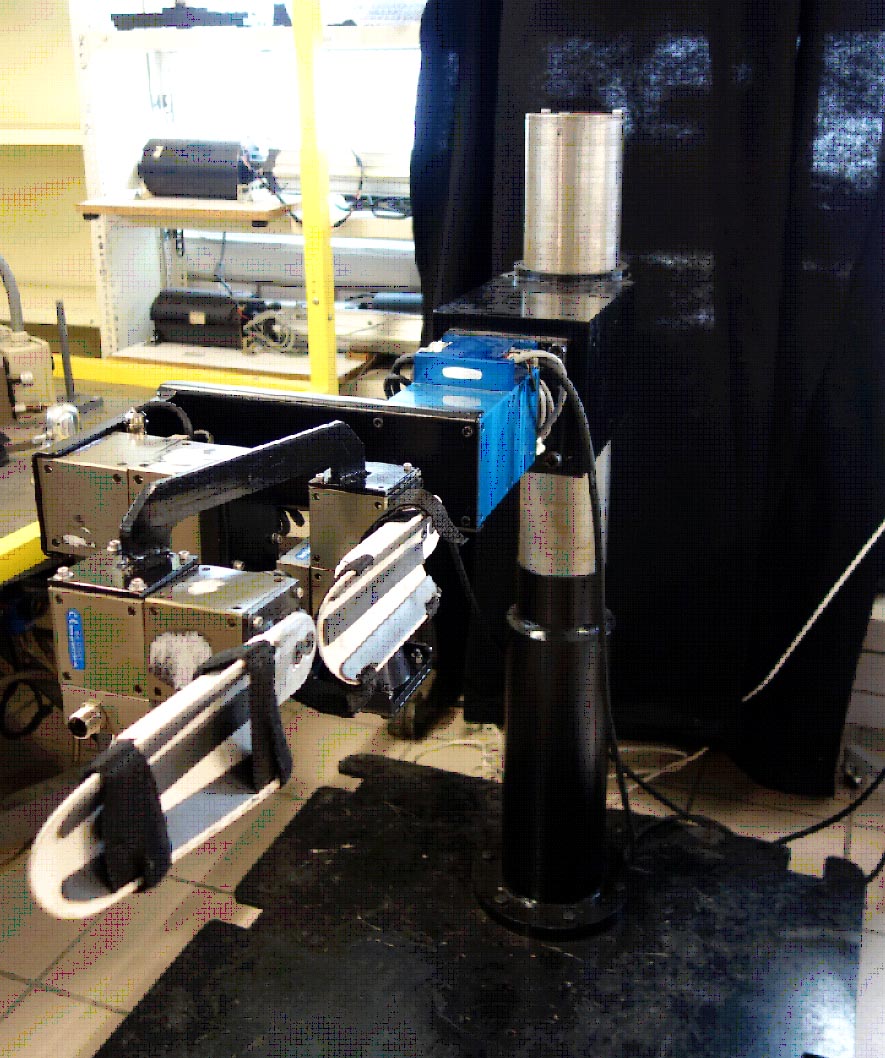
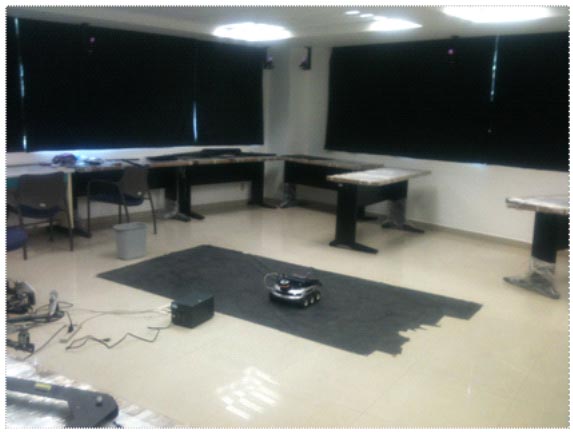
Set Membership Method for Simultaneous Localization and Mapping (SLAM). The extended Kalman filter (EKF) SLAM requires the uncertainty to be Gaussian noise. This assumption can be relaxed to bounded noise by the set membership SLAM. However, the published set membership SLAMs are not suitable for large-scale and online problems. In this project, we use ellipsoid algorithm for solving SLAM problem. The proposed ellipsoid SLAM has advantages over EKF SLAM and the other set membership SLAMs, in noise condition, online realization, and large-scale problem. By bounded ellipsoid technique, we analyze the convergence and stability of the ellipsoid SLAM. Simulation and experimental results show that the proposed ellipsoid SLAM is effective for online and large-scale problems such as Victoria Park dataset.
Tacking Control of Human-Robotic Systems (Upper Limb Exoskeleton ). This project focuses on the development of a tacking control system for a human-robotic upper limb exoskeleton. Tacking control is a method used to synchronize the movements of a robot with a human operator, ensuring seamless collaboration and effective task execution. The primary goal of this research is to create a control system that enables the exoskeleton to accurately follow the movements of the human operator’s upper limb, providing assistance and support for various tasks.

Teleoperation/Bilateral symmetric rehabilitation with haptic robots.Human brain has self-organization capability after paralysis caused by stork. This needs neuro-rehabilitation for stroke-patients. Recently, robotic technology is successfully applied in the rehabilitation. Most of robot rehabilitation devices are in 2-dimension, and do not have feedback from the environment. The rehabilitation effectiveness is not so good. In this project, we design a 3-demension rehabilitation system, which has force feedback. The patients have one more training dimension and one more sense (haptic feeling). The neuro recovery time is less than the other robot rehabilitation methods.