Prototipos de laboratorio
El Centro de Servicios Experimentales tiene por función apoyar las labores de enseñanza e investigación dentro del DCA y cuenta con la siguiente infraestructura:

Robot móvil Khepera
Cuenta con cámara de vídeo analógica, pinza y captores infrarrojos. Esta dotado de un procesador de 16 bits.

Plataformas de enseñanza basada en servomotores de corriente directa
Esta plataforma es utilizada para impartir cursos dentro del programa de posgrado del DCA. Está constituida de un motor de corriente directa de escobillas, un amplificador industrial basado en modulación por ancho de pulso, un decodificador óptico incremental de 2500 pulsos por revolución acoplado a la flecha del motor, un circuito que permite la estimación de la velocidad a partir de las mediciones del decodificador óptico, un circuito de aislamiento galvánico conectado entre el amplificador y una tarjeta de adquisición de datos, esta última dotada de convertidores A/D, D/A y de circuitos de lectura de decodificadores de posición ópticos, y dos computadoras con procesador Pentium 2, una de ellas fungiendo como controlador de tiempo real y la otra realizando la función de programación y adquisición de datos.

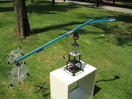
Robot de dos grados de libertad y plataforma de control visual:
Actuado mediante motores de corriente directa con escobillas los cuales mueven las articulaciones a través de bandas. Los motores están dotados de decodificadores de posición ópticos incrementales de 2500 pulsos por revolución y son impulsados por amplificadores basados en modulación de ancho de pulso. El control del robot se realiza a través de una cámara digital acoplada a una computadora personal la cual realiza el tratamiento de la imagen. La información visual es enviada a dos computadoras, una que ejecuta los algoritmos de control y otra en donde éstos son programados.

Robot móvil Koala
Comprende un procesador de 32 bits, dos cámaras de vídeo, un sonar, un medidor de rango por medio de láser, sensores infrarrojos y tarjeta de comunicación para red inalámbrica.

Robot modular
Robot construido a partir de 7 módulos independientes. Cada uno de ellos posee un motor, un reductor de velocidad, un decodificador óptico, un amplificador de potencia, un procesador digital para ejecutar el algoritmo de control en posición del motor y un procesador de comunicaciones. Cada módulo forma parte de una red basada en el protocolo CAN en donde una computadora externa tiene el papel de maestro de la red.

Sistema de tanques
Está constituido por tres tanques, cuatro válvulas y dos bombas. Se conecta a una computadora de control a través de una interfaz de propósito especial. Este equipo está orientado esencialmente a la prueba de algoritmos de control de nivel y de detección de fallas.

Servomecanismo hidráulico
Está dotado de dos actuadores hidráulicos, uno rectilíneo y otro rotatorio. Solo uno de ellos puede funcionar simultáneamente. Estos se controlan mediante una servoválvula cuyo flujo de aceite hidráulico es suministrado mediante una bomba. Ambos actuadores están dotados de decodificadores de posición ópticos incrementales y están conectados a cargas inerciales.

Simulador de procesos industriales
En este prototipo pueden probarse leyes de control de nivel, de flujo y de temperatura utilizando agua destilada. El agua es impulsada mediante una bomba hacia un primer recipiente. Este último descarga el agua hacia otro recipiente. La instrumentación comprende un medidor de flujo, un termómetro y un sensor de presión instalado en el fondo del primer recipiente. Existe también un dispositivo de enfriamiento para el agua así como una resistencia eléctrica para calentarla.
Helicóptero 3 DOF
Es un sistema electromecánico subactuado de tres grados de libertad y de dos actuadotes. Es posible medir, mediante decodificadores ópticos de 1024 pulsos por revolución, los ángulos de inclinación y de rotación así como el ángulo de rotación asociado al soporte de los actuadotes.

Plataforma de servomecanismos
Cuenta con 5 servomotores, 4 con escobillas y uno sin escobillas. Dos de ellos impulsan una carga inercial, los dos restantes poseen cargas inerciales y gravitacionales las cuales se modelan como péndulos sencillos.
Uno de los servomotores que impulsa una carga inercial está conectado a un amplificador lineal y el resto a amplificadores conmutados industriales. Esta plataforma posee muchas de las características de la plataforma de enseñanza basada en servomotores de corriente directa.

Robot paralelo plano sobreactuado
Está compuesto de tres brazos dotados de dos juntas rotacionales cada uno. Una de las juntas de cada brazo está motorizada y cada una de ellas tiene asociado un decodificador óptico absoluto de 4096 pulsos por revolución.
Las juntas motorizadas están impulsadas por motores de corriente directa con escobillas a través de bandas. El radio de las poleas es de 3.6:1.
Tiene asociado además un sistema de visión similar al de la plataforma de visual servoing el cual sirve para medir la posición del órgano terminal.

Sistema ball and beam
Se trata de un sistema subactuado no lineal de dos grados de libertad. El objetivo de control es el de posicionar una bola metálica sobre una barra. La barra está impulsada por un motor de corriente directa de escobillas.

Visual Servoing en 3 Dimensiones
Este es un sistema visual servoing en 3 Dimensiones en tiempo real. Comprende dos cámaras colocadas verticalmente y un mini robot con tres grados de libertad controlado por una computadora operada en un entorno Windows XP y Labview 7.0

Prototipo de Grúa Quanser
Responsable: Joaquín Collado / Cubículo A36 Informes: jcollado@ctrl.cinvestav.mx Financiamiento: LAFMAA (Laboratorio Franco Mexicano de Automatica Aplicada)
Plataforma de enseñanza


La plataforma de enseñanza de control es un producto integrado completo desarrollado por el Departamento de Control Automático que permite el prototipaje rápido. Se utiliza bajo el ambiente de tiempo real /Matlab/Simulink/RTW/.
La plataforma incluye en un formato compacto todos componentes necesarios:
- microcontrolador de alto desempeño,
- decodificador incremental de 2500 pulsos por revolución,
- interfaz de comunicación /USB/ de alta velocidad,
- amplificador de potencia con puente H,
- lazo de control de corriente,
- motor de corriente directa,
- aislamiento de la etapa de potencia y
- todas las fuentes para su funcionamiento
Tarjetas de adquisición de datos
- MultiQ: Tarjeta de ranura PCI, 8 canales A/D de entrada, 8 canales D/A de salida, circuitos de lectura de decodificadores ópticos, 32 canales entrada salida digitales.
- DSPACE: Modelo DS 1003 el cual cuenta con: Procesador TMS320C40. Tarjeta de adquisición de datos con 6 canales A/D, 6 canales D/A. Tarjeta de lectura de decodificadores de posición ópticos.
- SERVOTOGO: Tarjeta de ranura ISA, 8 canales A/D de entrada, 8 canales D/A de salida, circuitos de lectura de decodificadores ópticos, 32 canales entrada salida digitales.
Software especializado
- Matlab Simulink: Empleado para el control en tiempo real de varias plataformas junto con el programa WINCON y con el equipo DSPAC.
- WINCON: Programa de control en tiempo real utilizado en conjunción con Matlab Simulink y las tarjetas MultiQ y SERVOTOGO.
- LabView: Empleado con un módulo de adquisición de imágenes marca National Instruments.
- Dymola: Empleado para la simulación de sistemas electromecánicos.
Equipo de laboratorio
- 2 osciloscopios digitales marca Tektronics.
- 2 osciloscopios analógicos marca Tektronics.
- Multimetros digitales varias marcas.
- Medidores de inductancia, capacitancia y resistencia.
Departamento de Control Automático, CINVESTAV-IPN, Av IPN 2508, Zacatenco, Ciudad de México, 07360, México.